2. 快速入門

第 1 步:啟動演示並配置插件
-
啟動示範:
ros2 launch moveit2_tutorials demo.launch.py rviz_config:=panda_moveit_config_demo_empty.rviz -
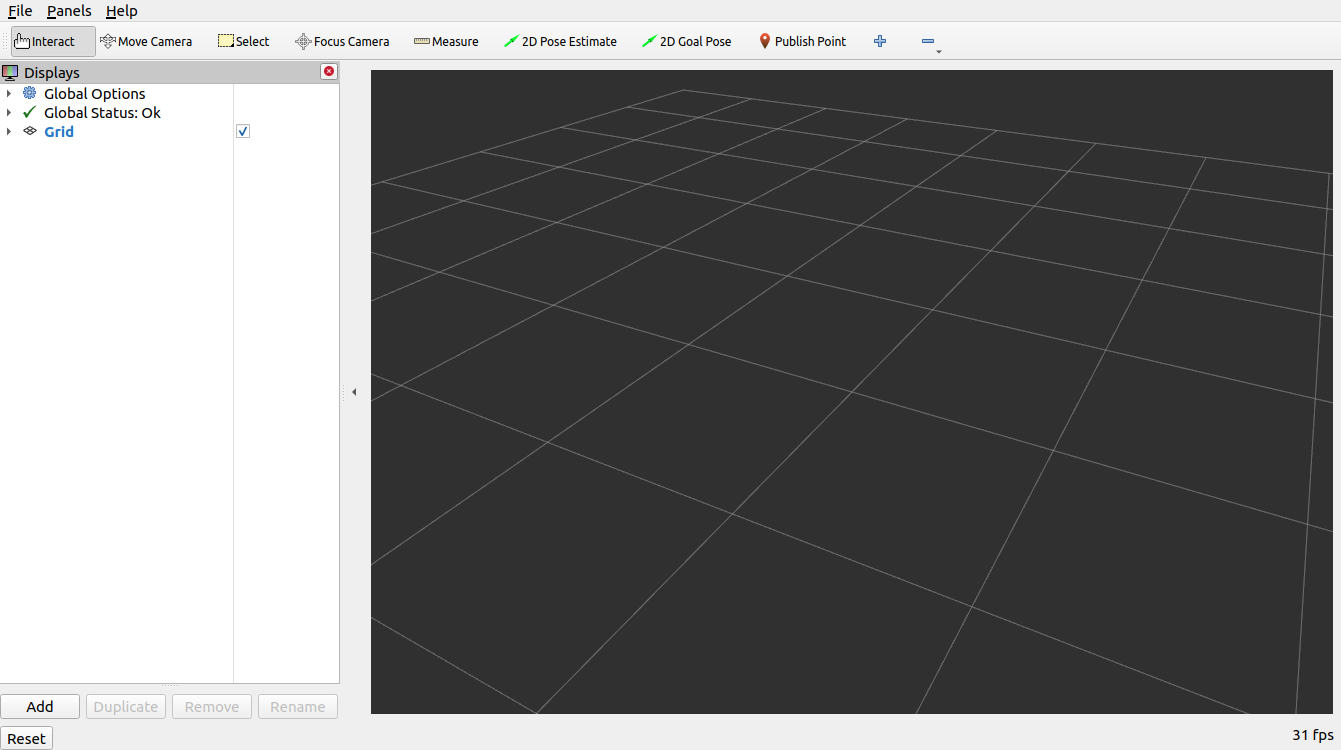
如果您是第一次執行此操作,您應該在 RViz 中看到一個空的世界,並且必須添加運動規劃插件:
- 您應該在 RViz 中看到一個空的世界:
- 在 RViz 顯示標籤中,按新增:
- 從 moveit_ros_visualization 資料夾中,選擇「MotionPlanning」作為 DisplayType。按“確定”。
- 您現在應該在 RViz 中看到 Panda 機器人:
- 載入運動規劃插件後,我們就可以對其進行配置。在「顯示」子視窗的「全域選項」標籤中,將**“Displays”**欄位設為
/panda_link0 - 現在,您可以開始為您的機器人(本例中為 Panda)配置插件。按一下**“Displays”中的「MotionPlanning」**。
- 確保Robot Description 欄位設定為
robot_description。 - 確保Planning Scene Topic欄位設定為
/monitored_planning_scene。按一下主題名稱以顯示主題名稱下拉式清單。 - 確保Planned Path下的Trajectory Topic設定為。
/display_planned_path - 在Planning Request中,將Planning Group 變更為
panda_arm。您也可以在左下角的 MotionPlanning 面板中看到這一點。 - 操作視頻:
第 2 步:玩視覺化機器人
有四種不同的重疊視覺化:
- 機器人在
/monitored_planning_scene規劃環境中的配置(預設為活動狀態)。 - 機器人的規劃路徑(預設為活動狀態)。
- 綠色:運動規劃的開始狀態(預設為停用)。
- 橘色:運動規劃的目標狀態(預設為活動狀態)。
可以使用複選框開啟和關閉每個視覺化的顯示狀態:
- 使用「Scene Robot **」樹選單中的「Show Robot Visual」**複選框規劃場景機器人。
- 使用「Planned Path」樹選單中的「Show Robot Visual **」**複選框來規劃路徑。
- 使用Planning Request樹選單中的Query Start State複選框的開始狀態。
- 使用Planning Request 樹選單中的Query Goal State 複選框的目標狀態。
- 使用所有這些複選框來開啟和關閉不同的視覺化效果。
第 3 步:與 Kinova Gen 3 交互
對於接下來的步驟,我們只需要場景機器人、開始狀態和目標狀態:
- 選取Planned Path 樹選單中的Show Robot Visual
- 取消選取Scene Robot樹選單中的Show Robot Visual複選框
- 選取Planning Request 樹選單中的Query Goal State複選框。
- 選取Query Start State樹選單中的Planning Request複選框。
現在應該有兩個互動式標記。與橘色手臂相對應的一個標記將用於設定運動規劃的“目標狀態Goal State”,與綠色手臂相對應的另一個標記將用於設定運動規劃的“開始狀態”。如果您沒有看到Interact標記,請按RViz 頂部選單中的**「互動」 (注意:某些工具可能會被隱藏,請按頂部選單中的「+」新增Interact**工具,如下所示)。
現在您應該能夠使用這些標記來拖曳手臂並更改其方向。嘗試一下!
進入碰撞狀態
對於本部分,隱藏計劃路徑和目標狀態:
- 取消選取Planned Path樹選單中的Show Robot Visual
- 取消選取Planning Request樹選單中的Query Goal State 複選框。
現在,只有“開始狀態”(綠色臂)應該可見。嘗試將手臂移動到其兩個連桿相互碰撞的配置。 (如果您發現這很困難,請確保未選取 MotionPlanning 外掛程式的規劃標籤下的「使用碰撞感知 IK」複選框Use Collision-Aware IK。)執行此操作後,發生碰撞的連結將變為紅色。
現在,選取「使用碰撞感知 IKUse Collision-Aware IK」複選框,並再次嘗試將兩個連結移動到彼此碰撞。勾選此複選框後,IK 解算器將繼續嘗試為所需的末端執行器姿勢找到無碰撞解決方案。如果未選中,解算器將允許解決方案中發生碰撞。無論複選框的狀態如何,發生衝突的連結總是會顯示為紅色。
移出可到達的工作空間
請注意當您嘗試將末端執行器移出其可到達的工作空間時會發生什麼。
!https://moveit.picknik.ai/main/_images/rviz_plugin_invalid.png
在進入下一部分之前,重新啟用計劃路徑和目標狀態:
- 選取Planned Path樹選單中的Show Robot Visual
- 選取 Planning Request 樹選單中的Query Goal State 複選框。
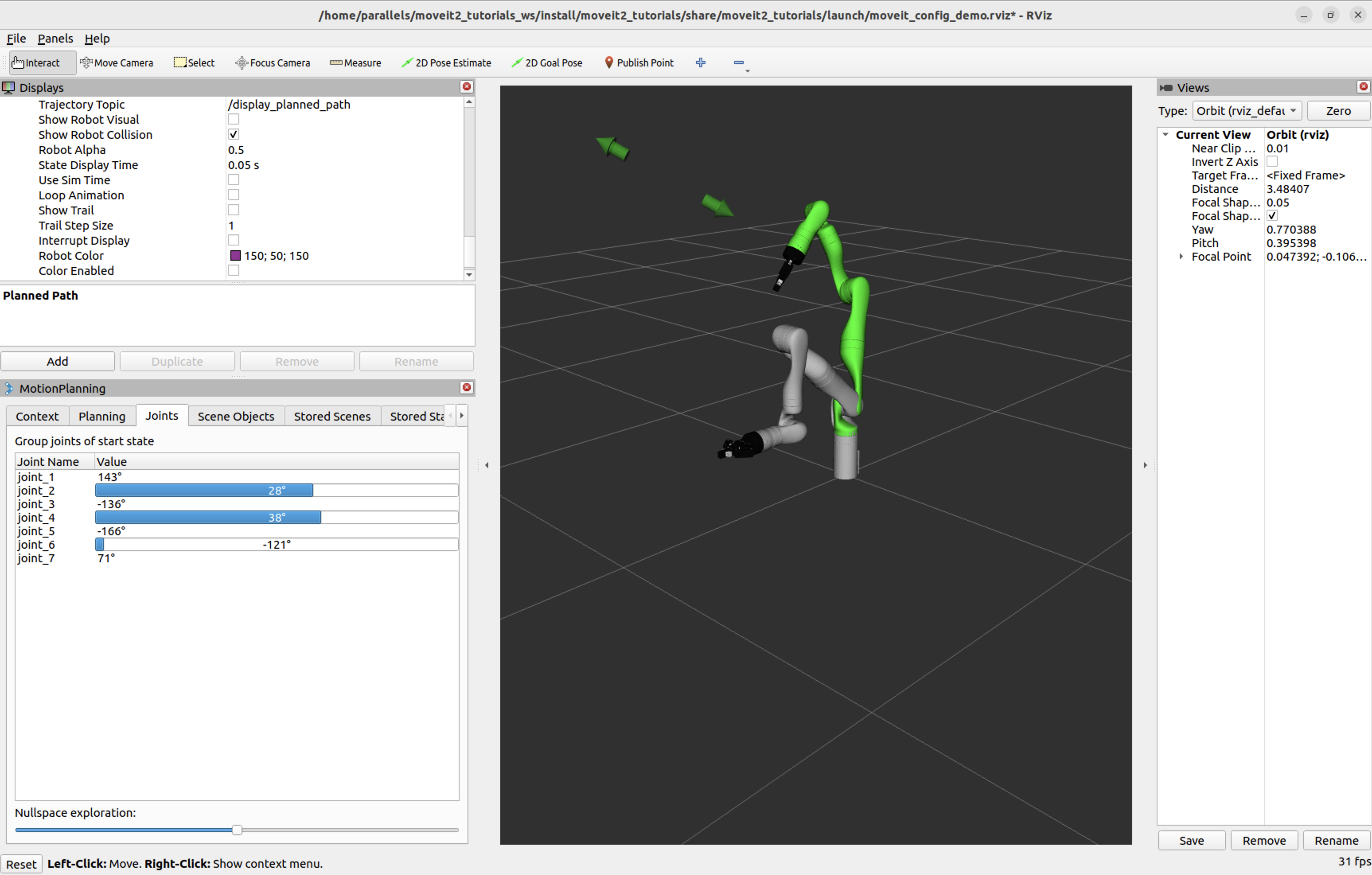
移動關節或在零空間中
您可以使用**「Joints」**標籤移動 7-DOF 機器人的單一關節和冗餘關節。嘗試移動“零空間探索null space exploration”滑桿,如下面的動畫所示。
第 4 步:在 Kinova Gen 3 中使用運動規劃
- 現在,您可以在 MoveIt RViz 插件中使用 Kinova Gen 3 開始運動規劃。
- 將開始狀態移到所需位置。
- 將目標狀態移到另一個所需位置。
- 確保這兩種狀態都不會與機器人本身發生碰撞。
- 取消選取Planned Path 樹選單中的 Show Trail 複選框。
- 在**「MotionPlanning」視窗的「Planning」標籤下,按下「Plan** **」**按鈕。
- 選取Planned Path 樹選單中的Show Trail複選框。您應該會看到由一系列操縱器姿勢表示的手臂路徑。
內省軌跡路點
您可以在 RViz 逐點直觀地內省軌跡。
- 從“Panels”選單中,選擇“Trajectory - Trajectory Slider”。您將在 RViz 上看到一個新的滑桿面板。
- 設定您的目標姿勢,然後執行Plan。
- 使用「滑桿」面板進行播放,例如移動滑桿,按下「播放」按鈕。
注意:將末端執行器放置到新目標後,請務必在執行Play之前執行Plan - 否則您將看到上一個目標的路徑點(如果可用)。
規劃笛卡兒運動
如果啟動「使用笛卡爾路徑」複選框,機器人將嘗試在笛卡爾空間中線性移動末端執行器。
執行軌跡、調整速度
計劃成功後點擊“計劃並執行”或“執行”會將軌跡發送給機器人——在本教程中,由於您使用了
kinova_demo.launch.py,因此僅模擬機器人。最初,預設速度和加速度縮放為
0.1機器人最大值的 10% ( 0.1)。您可以在如下所示的「規劃」標籤中變更這些縮放係數,或在moveit_config機器人的(在joint_limits.yaml)中變更這些預設值。
儲存您的配置
RViz 使您能夠將配置保存在.您應該在繼續學習下一個教程之前執行此操作。如果您選擇以新名稱儲存配置,則可以使用以下命令來使用和引用您的設定檔:
File->Save ConfigFile->Save Config Asros2 launch moveit2_tutorials demo.launch.py rviz_config:=your_rviz_config.rviz替換
your_rviz_config.rviz為您保存的文件的名稱moveit2_tutorials/doc/tutorials/quickstart_in_rviz/launch/並建立工作區以便可以找到它。- 機器人在














{kind=link}
{kind=link}
留言
張貼留言